This example illustrates a simple way of converting the boundary of binary object into a 1-dimentional representation, or signature. One of the purpose of this conversion is to reduce the complexity of the representation for classification purpose. Let's have a look on how to convert the object to signature and compare the signature for different object shapes.
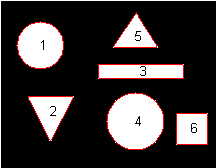
1. Original image (value 0 represent background while 1 represents object).
S = imread('pic19.jpg');
S = im2bw(S);
imshow(S);
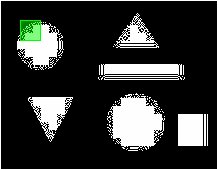
 2. Get the boundary and plot them on top of the original image.
2. Get the boundary and plot them on top of the original image.[B,L,N,A] = bwboundaries(S);
imshow(S);
for cnt = 1:N
hold on;
boundary = B{cnt};
plot(boundary(:,2), boundary(:,1),'r');
hold on;
text(mean(boundary(:,2)), mean(boundary(:,1)),num2str(cnt));
end
figure;
subplotrow = ceil(sqrt(N));
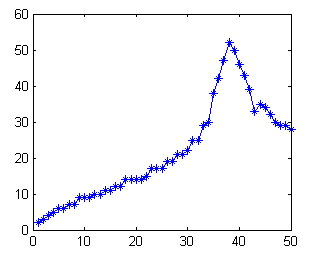
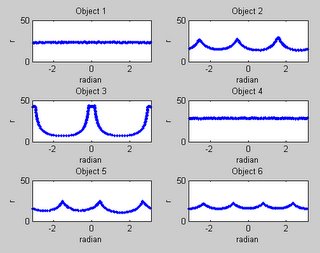
3. Plot the signature of each object.
for cnt = 1:N
boundary = B{cnt};
[th, r]=cart2pol(boundary(:,2)-mean(boundary(:,2)), ...
boundary(:,1)-mean(boundary(:,1)));
subplot(subplotrow,N/subplotrow,cnt);
plot(th,r,'.');
axis([-pi pi 0 50]);
xlabel('radian');ylabel('r');
title(['Object ', num2str(cnt)]);
end
More details explanation could be found from the
image processing reference book which could be found at the site bar of this page